✍️Description
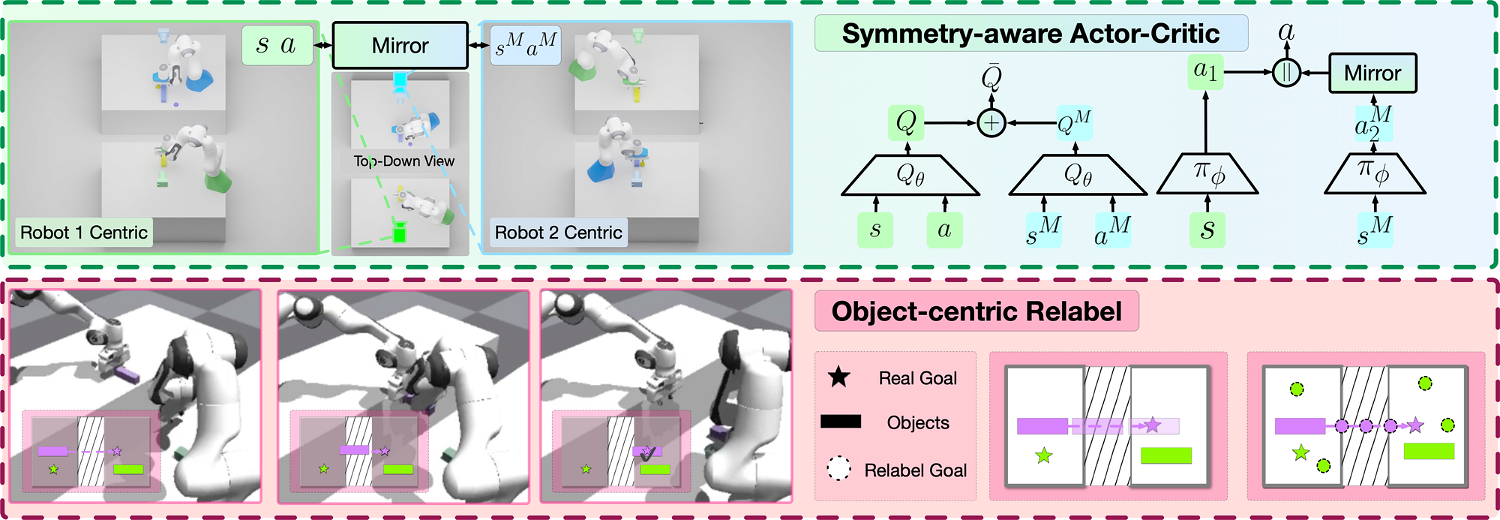
In this project, we utilize a reinforcement learning (RL) agent to jointly control two arms to rearrange objects as fast as possible. To reduce the policy search space in the bimanual control setting, we develop a symmetry-aware actor-critic framework that leverages the interchangeable roles of the two manipulators. To handle the compositionally over multiple objects, we augment training data with an object-centric relabeling technique. Our policy can rearrange up to 8 objects with a success rate of over 70% in simulation and was deployed to two Franka Panda arms. More details in https://sites.google.com/view/bimanual .
Contribution: As the co-first author, I come up with the idea of the symmetry-aware actor-critic framework to leverage the structure of bimanual manipulation problems. I designed and finished all implementations and experiments in simulation and hardware. The object-centric relabeling technique and hardware deployment part is a joint effort with another co-author.